lunes, 6 de septiembre de 2010
BOBINADO REBOBINADO DE MOTOTRES ELECTRICOS
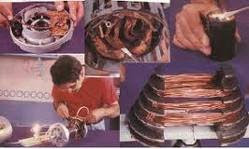
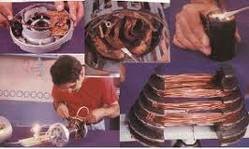
BOBINADO DE MOTORES ELECTRICOS La cantidad de tipo de motores no permite comentarlos a todos por este medio solo veremos los tipos mas usuales y los de uso actual. PARA LOS OTROS TIPOS DE MOTORES, OFRECEMOS RESPONDER LAS CONSULTAS QUE SE NOS HAGAN COMO SIEMPRE SIN CARGO Comenzaremos por los motores monofásicos. Los estatores de estos motores pueden tener 12-24 o 36 ranuras.
El eje soporta el rotor, su bobinado (jaula de ardilla) y los rulemanes sobre
los que gira. En la foto que se muestra el aluminio con que se fundió la jaula
de ardilla se le dio forma de palas de ventilador y ayudan a enfriar el motor
La llamada jaula de ardilla es el bobinado del rotor y consiste en barras de
cobre o aluminio soldadas entre si en ambos extremos, con la utilización
del aluminio la jaula se hace fundiendo el material sobre el rotor llenando
las ranuras del mismo.
MOTORES CON CAPACITOR Después de comprobar que la falla proviene del bobinado y no del capacitor o del centrifugo Tomamos los datos de fabrica del motor y marcamos la posición de las tapas respecto al cuerpo del motor. Quitamos polea si la tiene y ventilador si es exterior , sacamos los tornillos y con un punzón plano golpeamos la tapa trasera para separarla del cuerpo
Una vez separadas hacemos palanca con dos destornilladores y quitamos la tapa
Si en el motor sobresale el eje por atrás golpeamos este y sacamos la tapa delantera
junto con el eje y rotor, la tapa trasera se saca golpeando con una madera desde dentro del estator .
Los rectángulos azules representan los polos de arranque en un desarrollo plano
de las ranuras de estator
Los rojos representan los polos de trabajo
Calculo del paso Paso = Ranuras / polos = 32 / 4 = 8 Otros pasos: Ej. = Motor 24 ranuras 4 polos = 24 / 4 = paso 6 Motor 36 ranuras 4 polos = 36 / 4 = paso 9 Motor 24 ranuras 2 polos = 24 / 2 = paso 12
Bobinado de un polo visto desde las ranuras del estator paso 1-8 La primera bobina de un polo esta bobinada entre las ranuras 3-5, la segunda entre las ranuras 2-7 y la tercera entre las ranuras 1-8, paso del polo 1-8 .
En este grafico se muestra los inicios y fin de las bobinas que forman los cuatro polo
de este motor, los cuatro polos indican que gira a 1500 rpm si tuviera 2 giraría a
2800 rpm
Con los datos anteriores podemos interpretar cual es el bobinado que tiene un motor que desarmamos para bobinar. Sabiendo la velocidad sabemos la cantidad de polos que tiene
2800 rpm = 2 polos
1400 rpm = 4polos
900 rpm = 6 polos
700 rpm = 8 polos
Si no tenemos la velocidad contamos los polos de la bobina de trabajo (alambre mas
grueso)
recordando que esta formado por varias bobinas colocadas en forma concéntrica con
una separación llamada paso Desarmamos una bobina del bobinado de arranque y contamos las vueltas y medimos el
diámetro del alambre anotando todo (no tratar de memorizar ) y vemos el paso de cada
polo
Hacemos lo mismo con la de trabajo, quitando luego todo el alambre
Si tenemos coraje ya podemos empezar a bobinar haga clic Si no tenemos el numero de vueltas podemos calcularlo J = Dr x Le x B x p J= Flujo magnético Dr = Diámetro interno del rotor Le = longitud del motor B= Inducción en gauss (5000-7000) tomar 6000 p= numero de pares de polos Ya tenemos el flujo =J y lo aplicamos en la formula siguiente N = E x 100.000.000 / 2.2 x F x J N=Numero de espiras por polo
E= tensión de fase (monofasico una fase)
F= Frecuencia de red
J= Flujo
El resultado es el numero de vueltas por polo, recordemos que cada polo tiene
varias bobinas de acuerdo al paso, entonces dividir la vueltas totales de cada
polo por la cantidad de bobinas que lo forman
CONTINUAREMOS LA CANTIDAD DE VARIABLES DE BOBINADOS PARA UN MISMO MOTOR Y POTENCIA ES ELEVADA POR LO QUE LE PROPONEMOS NOS CONSULTEN PARA ENVIARLES INFORMACIÓN ESPECIFICA AL CASO
Monofásicos Como vimos los mas usados son de 1500 y 2800 rpm Veremos de bobinar uno de 1/2 HP y 2800 rpm Se corta el prespan aislante del doble del alto de la ranura y dos cmts mas largo que el ancho del estator Se doblan los bordes hacia atrás para evitar que se salgan.
Scribd ExploreCommunityUpload a Document Search Books, Presentations, Business, Academics... Login
Sign Up
Log In..
1First Page
Previous Page
Next Page
/ 12Zoom Out
Zoom In
Fullscreen
Exit Fullscreen Select View Mode
View ModeBookSlideshowScrollReadcast
Add a Comment
Embed & Share
VIDEO DE MOTOR TRIFASICO
Reading should be social! Post a message on your social networks to let others know what you're reading. Select the sites below and start sharing.Readcast this Document..
Login to Add a Comment..
Share & EmbedLink / URL: .Embed Size & Settings: Width: Auto Height: (proportional to specified width)Start on page: Preview View: Scroll Book Slideshow Tiled. More share options...Add to Collections
Download this Document for FreeAuto-hide: on
Ads by Google
Máquinas Bobinadoras CNC
Para motores, transformadores,
bobinas, balastos, solenoides, etc.
www.digmotor.com.br
400 Montacarga Forklifts
We ship from Miami to Latin America
Toyota & All Brands Available
www.worldwideforklifts.com/
VIDEO DE MOTOR ELECTRICO
Protector de Motor
Deja de Romper Motores, instala un
Supervisor, Tecnología Superior
www.siselco.com.ar
JDM Engines & Half Cut
Over 6000 JDM engines & halfcut in
our yard. Direct from Japan.
www.munleeauto.com
BOBINADO DE MOTORES ELECTRICOS La cantidad de tipo de motores no permite comentarlos a todos por este medio solo veremos los tipos mas usuales y los de uso actual. PARA LOS OTROS TIPOS DE MOTORES, OFRECEMOS RESPONDER LAS CONSULTAS QUE SE NOS HAGAN COMO SIEMPRE SIN CARGO Comenzaremos por los motores monofásicos. Los estatores de estos motores pueden tener 12-24 o 36 ranuras. La foto muestra el estator de un motor monofasico de 24 ranuras sin su bobinado EJE JAULA DE ARDILLA El eje soporta el rotor, su bobinado (jaula de ardilla) y los rulemanes sobre
los que gira. En la foto que se muestra el aluminio con que se fundió la jaula
de ardilla se le dio forma de palas de ventilador y ayudan a enfriar el motor
La llamada jaula de ardilla es el bobinado del rotor y consiste en barras de
cobre o aluminio soldadas entre si en ambos extremos, con la utilización
del aluminio la jaula se hace fundiendo el material sobre el rotor llenando
las ranuras del mismo
Ads by Google
Agua dura? No problema.
Descalcificación sin productos
químicos ni descalcificadores.
www.scalewatcher.com Ductos para aire Vermont
Todo tipo de ductos para aire
marca vermont, metalicos, flexibles
www.vermont.com.mx
esquema de una jaula de ardilla MOTORES CON CAPACITOR Después de comprobar que la falla proviene del bobinado y no del capacitor o del centrifugo Tomamos los datos de fabrica del motor y marcamos la posición de las tapas respecto al cuerpo del motor. Quitamos polea si la tiene y ventilador si es exterior , sacamos los tornillos y con un punzón plano golpeamos la tapa trasera para separarla del cuerpo
Una vez separadas hacemos palanca con dos destornilladores y quitamos la tapa
Si en el motor sobresale el eje por atrás golpeamos este y sacamos la tapa delantera
junto con el eje y rotor, la tapa trasera se saca golpeando con una madera desde dentro del estator Golpeamos el eje desde atrás Hacemos palanca en la tapa
Sacamos la tapa posterior - Contamos las ranuras del estator y anotamos los polos y el paso de acuerdo a lo que se observa en los gráficos posteriores Motor de 32 ranuras 4 polos paso 1-8 Los rectángulos azules representan los polos de arranque en un desarrollo plano
de las ranuras de estator
Los rojos representan los polos de trabajo
Calculo del paso Paso = Ranuras / polos = 32 / 4 = 8 Otros pasos: Ej. = Motor 24 ranuras 4 polos = 24 / 4 = paso 6 Motor 36 ranuras 4 polos = 36 / 4 = paso 9 Motor 24 ranuras 2 polos = 24 / 2 = paso 12
Bobinado de un polo visto desde las ranuras del estator paso 1-8 La primera bobina de un polo esta bobinada entre las ranuras 3-5, la segunda entre las ranuras 2-7 y la tercera entre las ranuras 1-8, paso del polo 1-8 Para el segundo polo se puede ver en el grafico de abajo que es 11-14,10-15 y 9-16, etc En este grafico se muestra los inicios y fin de las bobinas que forman los cuatro polo
de este motor, los cuatro polos indican que gira a 1500 rpm si tuviera 2 giraría a
2800 rpm
Con los datos anteriores podemos interpretar cual es el bobinado que tiene un motor que desarmamos para bobinar. Sabiendo la velocidad sabemos la cantidad de polos que tiene
2800 rpm = 2 polos
1400 rpm = 4polos
900 rpm = 6 polos
700 rpm = 8 polos
Si no tenemos la velocidad contamos los polos de la bobina de trabajo (alambre mas
grueso)
recordando que esta formado por varias bobinas colocadas en forma concéntrica con
una separación llamada paso Desarmamos una bobina del bobinado de arranque y contamos las vueltas y medimos el
diámetro del alambre anotando todo (no tratar de memorizar ) y vemos el paso de cada
polo
Hacemos lo mismo con la de trabajo, quitando luego todo el alambre
Si tenemos coraje ya podemos empezar a bobinar haga clic Si no tenemos el numero de vueltas podemos calcularlo J = Dr x Le x B x p J= Flujo magnético Dr = Diámetro interno del rotor Le = longitud del motor B= Inducción en gauss (5000-7000) tomar 6000 p= numero de pares de polos Ya tenemos el flujo =J y lo aplicamos en la formula siguiente N = E x 100.000.000 / 2.2 x F x J N=Numero de espiras por polo
E= tensión de fase (monofasico una fase)
F= Frecuencia de red
J= Flujo
El resultado es el numero de vueltas por polo, recordemos que cada polo tiene
varias bobinas de acuerdo al paso, entonces dividir la vueltas totales de cada
polo por la cantidad de bobinas que lo forman
CONTINUAREMOS LA CANTIDAD DE VARIABLES DE BOBINADOS PARA UN MISMO MOTOR Y POTENCIA ES ELEVADA POR LO QUE LE PROPONEMOS NOS CONSULTEN PARA ENVIARLES INFORMACIÓN ESPECIFICA AL CASO
Monofásicos Como vimos los mas usados son de 1500 y 2800 rpm Veremos de bobinar uno de 1/2 HP y 2800 rpm Se corta el prespan aislante del doble del alto de la ranura y dos cmts mas largo que el ancho del estator Se doblan los bordes hacia atrás para evitar que se salgan y se colocan en las ranuras La foto muestra un estator de 24 ranuras ya limpio donde se colocaron las guías aislantes con los bordes hacia atrás BOBINADO MANUAL Marcamos el alojamiento de la primera bobina dejando dos ranuras libres como vimos en el esquema de las bobinas de un polo Introducimos dos cuñas de madera en la ranuras libres haciendo que sobren fuera del estator 4-5 cm. de cada lado Alambres de la bobina por debajo de las cuñas Una vez terminada la bobina se traba con una tira de aislante ajustado entre la bobina y el borde de la ranura Ya se instalo la primera y segunda bobina y se siguen colocando cuñas para mantener las bobinas en su lugar, se instalan las restantes Ya colocamos las bobinas de un polo que tiene paso 1-12
Es necesario aclarar que esto significa que la bobina del extremo ocupa
la posición 1-12
En el grafico se muestran las posiciones de las bobinas y los polos Ya esta la 1-12 de trabajo seguiremos con la 13 - 24 de trabajo CONTINUA Rodamientos Todos los motores MGM están equipados con rodamientos de bolas con doble obturación. Los rodamientos están lubricados de por vida con notable reserva de grasa, las guarniciones son de goma sintética resistente a los aceites y el desgaste.
El eje soporta el rotor, su bobinado (jaula de ardilla) y los rulemanes sobre
los que gira. En la foto que se muestra el aluminio con que se fundió la jaula
La llamada jaula de ardilla es el bobinado del rotor y consiste en barras de
cobre o aluminio soldadas entre si en ambos extremos, con la utilización
del aluminio la jaula se hace fundiendo el material sobre el rotor llenando
las ranuras del mismo.
MOTORES CON CAPACITOR Después de comprobar que la falla proviene del bobinado y no del capacitor o del centrifugo Tomamos los datos de fabrica del motor y marcamos la posición de las tapas respecto al cuerpo del motor. Quitamos polea si la tiene y ventilador si es exterior , sacamos los tornillos y con un punzón plano golpeamos la tapa trasera para separarla del cuerpo
Una vez separadas hacemos palanca con dos destornilladores y quitamos la tapa
Si en el motor sobresale el eje por atrás golpeamos este y sacamos la tapa delantera
junto con el eje y rotor, la tapa trasera se saca golpeando con una madera desde dentro del estator .
Los rectángulos azules representan los polos de arranque en un desarrollo plano
de las ranuras de estator
Los rojos representan los polos de trabajo
Calculo del paso Paso = Ranuras / polos = 32 / 4 = 8 Otros pasos: Ej. = Motor 24 ranuras 4 polos = 24 / 4 = paso 6 Motor 36 ranuras 4 polos = 36 / 4 = paso 9 Motor 24 ranuras 2 polos = 24 / 2 = paso 12
Bobinado de un polo visto desde las ranuras del estator paso 1-8 La primera bobina de un polo esta bobinada entre las ranuras 3-5, la segunda entre las ranuras 2-7 y la tercera entre las ranuras 1-8, paso del polo 1-8 .
En este grafico se muestra los inicios y fin de las bobinas que forman los cuatro polo
de este motor, los cuatro polos indican que gira a 1500 rpm si tuviera 2 giraría a
2800 rpm
Con los datos anteriores podemos interpretar cual es el bobinado que tiene un motor que desarmamos para bobinar. Sabiendo la velocidad sabemos la cantidad de polos que tiene
2800 rpm = 2 polos
1400 rpm = 4polos
900 rpm = 6 polos
700 rpm = 8 polos
Si no tenemos la velocidad contamos los polos de la bobina de trabajo (alambre mas
grueso)
recordando que esta formado por varias bobinas colocadas en forma concéntrica con
una separación llamada paso Desarmamos una bobina del bobinado de arranque y contamos las vueltas y medimos el
diámetro del alambre anotando todo (no tratar de memorizar ) y vemos el paso de cada
polo
Hacemos lo mismo con la de trabajo, quitando luego todo el alambre
Si tenemos coraje ya podemos empezar a bobinar haga clic Si no tenemos el numero de vueltas podemos calcularlo J = Dr x Le x B x p J= Flujo magnético Dr = Diámetro interno del rotor Le = longitud del motor B= Inducción en gauss (5000-7000) tomar 6000 p= numero de pares de polos Ya tenemos el flujo =J y lo aplicamos en la formula siguiente N = E x 100.000.000 / 2.2 x F x J N=Numero de espiras por polo
E= tensión de fase (monofasico una fase)
F= Frecuencia de red
J= Flujo
El resultado es el numero de vueltas por polo, recordemos que cada polo tiene
varias bobinas de acuerdo al paso, entonces dividir la vueltas totales de cada
polo por la cantidad de bobinas que lo forman
CONTINUAREMOS LA CANTIDAD DE VARIABLES DE BOBINADOS PARA UN MISMO MOTOR Y POTENCIA ES ELEVADA POR LO QUE LE PROPONEMOS NOS CONSULTEN PARA ENVIARLES INFORMACIÓN ESPECIFICA AL CASO
Monofásicos Como vimos los mas usados son de 1500 y 2800 rpm Veremos de bobinar uno de 1/2 HP y 2800 rpm Se corta el prespan aislante del doble del alto de la ranura y dos cmts mas largo que el ancho del estator Se doblan los bordes hacia atrás para evitar que se salgan.
Scribd ExploreCommunityUpload a Document Search Books, Presentations, Business, Academics... Login
Sign Up
Log In..
1First Page
Previous Page
Next Page
/ 12Zoom Out
Zoom In
Fullscreen
Exit Fullscreen Select View Mode
View ModeBookSlideshowScrollReadcast
Add a Comment
Embed & Share
VIDEO DE MOTOR TRIFASICO
Reading should be social! Post a message on your social networks to let others know what you're reading. Select the sites below and start sharing.Readcast this Document..
Login to Add a Comment..
Share & EmbedLink / URL: .Embed Size & Settings: Width: Auto Height: (proportional to specified width)Start on page: Preview View: Scroll Book Slideshow Tiled. More share options...Add to Collections
Download this Document for FreeAuto-hide: on
Ads by Google
Máquinas Bobinadoras CNC
Para motores, transformadores,
bobinas, balastos, solenoides, etc.
www.digmotor.com.br
400 Montacarga Forklifts
We ship from Miami to Latin America
Toyota & All Brands Available
www.worldwideforklifts.com/
VIDEO DE MOTOR ELECTRICO
Protector de Motor
Deja de Romper Motores, instala un
Supervisor, Tecnología Superior
www.siselco.com.ar
JDM Engines & Half Cut
Over 6000 JDM engines & halfcut in
our yard. Direct from Japan.
www.munleeauto.com
BOBINADO DE MOTORES ELECTRICOS La cantidad de tipo de motores no permite comentarlos a todos por este medio solo veremos los tipos mas usuales y los de uso actual. PARA LOS OTROS TIPOS DE MOTORES, OFRECEMOS RESPONDER LAS CONSULTAS QUE SE NOS HAGAN COMO SIEMPRE SIN CARGO Comenzaremos por los motores monofásicos. Los estatores de estos motores pueden tener 12-24 o 36 ranuras. La foto muestra el estator de un motor monofasico de 24 ranuras sin su bobinado EJE JAULA DE ARDILLA El eje soporta el rotor, su bobinado (jaula de ardilla) y los rulemanes sobre
los que gira. En la foto que se muestra el aluminio con que se fundió la jaula
de ardilla se le dio forma de palas de ventilador y ayudan a enfriar el motor
La llamada jaula de ardilla es el bobinado del rotor y consiste en barras de
cobre o aluminio soldadas entre si en ambos extremos, con la utilización
del aluminio la jaula se hace fundiendo el material sobre el rotor llenando
las ranuras del mismo
Ads by Google
Agua dura? No problema.
Descalcificación sin productos
químicos ni descalcificadores.
www.scalewatcher.com Ductos para aire Vermont
Todo tipo de ductos para aire
marca vermont, metalicos, flexibles
www.vermont.com.mx
esquema de una jaula de ardilla MOTORES CON CAPACITOR Después de comprobar que la falla proviene del bobinado y no del capacitor o del centrifugo Tomamos los datos de fabrica del motor y marcamos la posición de las tapas respecto al cuerpo del motor. Quitamos polea si la tiene y ventilador si es exterior , sacamos los tornillos y con un punzón plano golpeamos la tapa trasera para separarla del cuerpo
Una vez separadas hacemos palanca con dos destornilladores y quitamos la tapa
Si en el motor sobresale el eje por atrás golpeamos este y sacamos la tapa delantera
junto con el eje y rotor, la tapa trasera se saca golpeando con una madera desde dentro del estator Golpeamos el eje desde atrás Hacemos palanca en la tapa
Sacamos la tapa posterior - Contamos las ranuras del estator y anotamos los polos y el paso de acuerdo a lo que se observa en los gráficos posteriores Motor de 32 ranuras 4 polos paso 1-8 Los rectángulos azules representan los polos de arranque en un desarrollo plano
de las ranuras de estator
Los rojos representan los polos de trabajo
Calculo del paso Paso = Ranuras / polos = 32 / 4 = 8 Otros pasos: Ej. = Motor 24 ranuras 4 polos = 24 / 4 = paso 6 Motor 36 ranuras 4 polos = 36 / 4 = paso 9 Motor 24 ranuras 2 polos = 24 / 2 = paso 12
Bobinado de un polo visto desde las ranuras del estator paso 1-8 La primera bobina de un polo esta bobinada entre las ranuras 3-5, la segunda entre las ranuras 2-7 y la tercera entre las ranuras 1-8, paso del polo 1-8 Para el segundo polo se puede ver en el grafico de abajo que es 11-14,10-15 y 9-16, etc En este grafico se muestra los inicios y fin de las bobinas que forman los cuatro polo
de este motor, los cuatro polos indican que gira a 1500 rpm si tuviera 2 giraría a
2800 rpm
Con los datos anteriores podemos interpretar cual es el bobinado que tiene un motor que desarmamos para bobinar. Sabiendo la velocidad sabemos la cantidad de polos que tiene
2800 rpm = 2 polos
1400 rpm = 4polos
900 rpm = 6 polos
700 rpm = 8 polos
Si no tenemos la velocidad contamos los polos de la bobina de trabajo (alambre mas
grueso)
recordando que esta formado por varias bobinas colocadas en forma concéntrica con
una separación llamada paso Desarmamos una bobina del bobinado de arranque y contamos las vueltas y medimos el
diámetro del alambre anotando todo (no tratar de memorizar ) y vemos el paso de cada
polo
Hacemos lo mismo con la de trabajo, quitando luego todo el alambre
Si tenemos coraje ya podemos empezar a bobinar haga clic Si no tenemos el numero de vueltas podemos calcularlo J = Dr x Le x B x p J= Flujo magnético Dr = Diámetro interno del rotor Le = longitud del motor B= Inducción en gauss (5000-7000) tomar 6000 p= numero de pares de polos Ya tenemos el flujo =J y lo aplicamos en la formula siguiente N = E x 100.000.000 / 2.2 x F x J N=Numero de espiras por polo
E= tensión de fase (monofasico una fase)
F= Frecuencia de red
J= Flujo
El resultado es el numero de vueltas por polo, recordemos que cada polo tiene
varias bobinas de acuerdo al paso, entonces dividir la vueltas totales de cada
polo por la cantidad de bobinas que lo forman
CONTINUAREMOS LA CANTIDAD DE VARIABLES DE BOBINADOS PARA UN MISMO MOTOR Y POTENCIA ES ELEVADA POR LO QUE LE PROPONEMOS NOS CONSULTEN PARA ENVIARLES INFORMACIÓN ESPECIFICA AL CASO
Monofásicos Como vimos los mas usados son de 1500 y 2800 rpm Veremos de bobinar uno de 1/2 HP y 2800 rpm Se corta el prespan aislante del doble del alto de la ranura y dos cmts mas largo que el ancho del estator Se doblan los bordes hacia atrás para evitar que se salgan y se colocan en las ranuras La foto muestra un estator de 24 ranuras ya limpio donde se colocaron las guías aislantes con los bordes hacia atrás BOBINADO MANUAL Marcamos el alojamiento de la primera bobina dejando dos ranuras libres como vimos en el esquema de las bobinas de un polo Introducimos dos cuñas de madera en la ranuras libres haciendo que sobren fuera del estator 4-5 cm. de cada lado Alambres de la bobina por debajo de las cuñas Una vez terminada la bobina se traba con una tira de aislante ajustado entre la bobina y el borde de la ranura Ya se instalo la primera y segunda bobina y se siguen colocando cuñas para mantener las bobinas en su lugar, se instalan las restantes Ya colocamos las bobinas de un polo que tiene paso 1-12
Es necesario aclarar que esto significa que la bobina del extremo ocupa
la posición 1-12
En el grafico se muestran las posiciones de las bobinas y los polos Ya esta la 1-12 de trabajo seguiremos con la 13 - 24 de trabajo CONTINUA Rodamientos Todos los motores MGM están equipados con rodamientos de bolas con doble obturación. Los rodamientos están lubricados de por vida con notable reserva de grasa, las guarniciones son de goma sintética resistente a los aceites y el desgaste.
REBOBINADO DE MOTORES UNIVERSALES
Los motores universales son motores en serie de potencia fraccional, de corriente alterna, diseñados especialmente para usarse en potencia ya sea de corriente continua o de corriente alterna. Recordemos que el motor serie de corriente continua se caracteriza por disponer de un fuerte par de arranque y que la velocidad del rotor varía en sentido inverso de la carga, pudiendo llegar a embalarse cuando funciona en vacío. Estos motores tienen la misma característica de velocidad y par cuando funcionan en c.a. o en c.c. En general, los motores universales pequeños no requieren devanados compensadores debido a que el número de espiras de su armadura es reducido y por lo tanto, también lo será su reactancia de armadura. Como resultado, los motores inferiores a 3/8 de caballo de fuerza generalmente se construyen sin compensación. El costo de los motores universales no compensados es relativamente bajo por lo que su aplicación es muy común en aparatos domésticos ligeros, por ejemplo: aspiradoras, taladros de mano, licuadoras, etc. El motor universal es sin duda, el más utilizado en la industria del electrodoméstico. Su nombre deriva del hecho de que puede funcionar tanto en corriente alterna como en corriente continua. Para que un motor de este tipo pueda funcionar con c.a. es necesario que el empilado de su inductor (el núcleo de los electroimanes) sea de chapa magnética para evitar las corrientes de Foucault. Por otra parte, la conmutación resulta en los motores universales que en los de corriente continua, por lo que la vida de las escobillas y el colector es más corta, inconveniente que reduce mucho el campo de aplicación de los motores universales.
Los motores universales grandes tienen algún tipo de compensación. Normalmente se trata del devanado compensador del motor serie o un devanado de campo distribuido especialmente para contrarrestar los problemas de la reacción de armadura.
Su esquema de conexiones y sus características de funcionamiento corresponden a las de un motor serie.
El estator de los motores universales que se utilizan en electrodomésticos (y también para otros servicios) suele ser bipolar, con dos bobinas inductoras.
La parte más delicada y de construcción más laboriosa de estos motores es el rotor o inducido. Núcleo, bobinados, colector y eje requieren una construcción muy cuidada. En general, los motores universales para electrodomésticos están calculados para girar a altas velocidades; y como los entrehierros son pequeños, cualquier descentramiento o desequilibrio existente en el conjunto rotor produce vibraciones que pueden perturbar el funcionamiento y dañar seriamente el motor. Estos motores se someten a una operación de equilibrado que se efectúa con complicados instrumentos electrónicos.
El eje, que gira a gran velocidad, debe sustentarse en rodamientos de bolas o sobre casquillos de bronce poroso autolubricantes.
La velocidad de estos motores depende de la carga: a más carga, menos velocidad y viceversa. Esta propiedad y el poseer un elevado par de arranque son lo más característico de los motores universales.

VENTAJAS Y DESVENTAJAS DE LOS MOTORES UNIVERSALES
Entre las ventajas de estos motores deben contarse éstas:
•Que pueden construirse para cualquier velocidad de giro y resulta fácil conseguir grandes velocidades, cosa que no puede conseguirse con otros motores de c.a.
•Funcionan indistintamente con c.c. y/o con c.a.
•Poseen un elevado par de arranque.
•La velocidad se adapta a la carga.
•Para regular la velocidad de giro basta con conectar un reóstato en serie con el inducido.
Las desventajas de estos motores son:
•Que contienen elementos delicados que requieren una revisión periódica; es preciso entonces comprobar el desgaste del colector, de las escobillas, el envejecimiento de los muelles que las oprimen contra las delgas del colector, etc.
•El contacto deslizante entre colector y escobillas produce chispas que pueden perturbar el funcionamiento de los receptores de radio y de televisión que se encuentran en zona próxima al motor.
•Por causa de la gran velocidad de giro, estos motores son algo ruidosos.

•Su inducido es de difícil reparación, casi siempre resulta más ventajoso sustituirlo por otro nuevo.
Los motores universales miniatura, como los que se utilizan en máquinas de afeitar y en juguetería, por ejemplo, tienen el inducido mucho más simple; casi siempre con tres bobinas arrolladas sobre núcleos en estrella. El colector, para que ocupe menos espacio, deja de ser de tambor para convertirse en un colector de disco. También el estator es muy simple, con una sola bobina.
En algunos juguetes que funcionan con c.a. el inductor es de dos piezas, una de ellas es móvil. El movimiento de esta parte del inductor (que se produce siempre que se interrumpe la corriente) arrastra el dispositivo del cambio de marchas.
FUNCIONAMIENTO DEL MOTOR UNIVERSAL
Los motores universales funcionan generalmente en altas velocidades, de 3.500 a 20.000 r.p.m., esto da lugar a un alto cociente de energía-a-peso y de energía-a-tamaño, haciéndolos deseables para las herramientas hand-held, aspiradores y máquinas de costura. Un motor universal tiene altas velocidades usando diversas corrientes de una fuente de energía. El funcionamiento cerca de la carga clasificada es similar para todas las fuentes, comenzar el esfuerzo de torsión es alto y la regulación de la velocidad es pobre, la velocidad es muy alta en las cargas que son bajas. Teóricamente, en la carga cero la velocidad llega a ser infinita, así algunos motores universales deben emplear controles de velocidad.
Este motor está construido de manera que cuando los devanados inducido e inductor están unidos en serie y circula una corriente por ellos, se forman dos flujos magnéticos que al reaccionar provocan el giro del rotor, tanto si la tensión aplicada es continua como alterna.
CARACTERÍSTICA PAR-VELOCIDAD DEL MOTOR UNIVERSAL
En la figura 1 se muestra una típica característica par-velocidad de un motor universal. Esta característica difiere de la característica par-velocidad de la misma máquina que opera conectada a una fuente dc por las 2 siguientes razones:
•Los devanados del inducido y de campo tienen reactancia bastante grande a 50 o 60 Hz. Una parte significativa del voltaje de entrada cae a través de estas reactancias; por tanto, EA es menor para un voltaje de entrada dado durante la operación a.c. que durante la operación d.c. Puesto que EA= kØ , para una corriente del inducido y un par inducido dados, el motor es más lento en corriente alterna que en corriente continua.
•Además, el voltaje máximo de un sistema es
veces su valor rms, de modo que podría ocurrir saturación magnética cerca de la corriente máxima de la máquina. Esta saturación podría reducir significativamente el flujo rms del motor para un nivel de corriente dado y tiende a reducir el par inducido de la máquina.

APLICACIONES DE LOS MOTORES UNIVERSALES
El motor universal tiene la característica par-velocidad descendente, fuertemente empinada de un motor dc serie, de modo que no es adecuado para aplicaciones de velocidad constante. Sin embargo, por ser compacto y dar más par por amperio que cualquier otro motor monofásico, se utiliza en aplicaciones donde se requieren un peso ligero y alto par.
Aplicaciones típicas de este motor son las aspiradoras eléctricas, los taladros y las herramientas manuales similares, así como los utensilios de cocina.
m ind
CONSTRUCCIÓN DE LOS MOTORES UNIVERSALES
Las partes principales del motor universal con arrollamiento inductor concentrado son:
•La carcasa.
•El estator
•El inducido.
•Los escudos.
La carcasa suele ser por lo regular de acero laminado, de aluminio o de fundición con dimensiones adecuadas para mantener firmes las chapas del estator. Los polos suelen estar afianzados a la carcasa con pernos pasantes. Con frecuencia se construye la carcasa de una pieza, con los soportes o pies del motor.
El estator o inductor, que se representa junto con otras partes componentes, consiste en un paquete de chapas de forma adecuada, fuertemente prensadas y fijadas mediante remaches o pernos.
El inducido es similar al de un motor de corriente continua pequeño. Consiste en un paquete de chapas que forma un núcleo compacto con ranuras normales u oblicuas y un colector al cual van conectados los terminales del arrollamiento inducido. Tanto el núcleo de chapas como el colector, van sólidamente asentados sobre el eje.
Los escudos, como en todos los motores, van montados en los lados frontales de la carcasa y asegurados con tornillos. En los escudos van alojados los cojinetes, que pueden ser de resbalamiento o de bolas, en los que descansan los extremos del eje. En muchos motores universales pueden desmontarse sólo un escudo, pues el otro está fundido con la carcasa. Los portaescobillas van por lo regular sujetos al escudo frontal mediante pernos.
DETECCIÓN, LOCALIZACIÓN Y REPARACIÓN DE AVERÍAS EN MOTORES UNIVERSALES
•Pruebas: Tanto el arrollamiento inductor como el del inducido deben verificarse detenidamente antes y después de su montaje. El arrollamiento inductor se comprobará en busca de contactos a masa, cortocircuitos, interrupciones e inversiones de polaridad. No hay que olvidar que antes de rebobinar un inducido hay que verificar el colector en busca de posibles delgas en cortocircuito o contactos a masa.
•Reparación: Las averías que pueden presentarse en los motores universales son las mismas que ocurren en los de motores continua. A continuación, se enumeran las más corrientes:
•Si se producen chispas abundantes en funcionamiento, las causas pueden ser:
•Terminales de bobinas conectados a delgas que no corresponden.
•Polos inductores con cortocircuito.
•Interrupción en las bobinas del inducido.
•Cortocircuito en las bobinas del inducido.
•Terminales de bobinas invertidos.
•Cojinetes desgastados.
•Láminas de mica salientes.
•Sentido de rotación invertidos.
•Si el motor se calienta en exceso, puede ser debido a:
•Cojinetes desgastados.
•Falta de engrase en los cojinetes.
•Bobinas con cortocircuitos.
•Sobrecarga.
•Arrollamientos inductores con cortocircuitos.
•Escobillas mal situadas.
•Si el motor desprende humo, las causas pueden ser:
•Inducido con cortocircuitos.
•Cojinetes desgastados.
•Arrollamientos inductores con cortocircuitos.
•Tensión inadecuada.
•Sobrecarga.
•Si el par motor es débil, puede ser debido a:
•Bobinas con cortocircuitos.
•Arrollamientos inductores con cortocircuitos.
•Escobillas mal situadas.
•Cojinetes desgastados.

acontinuacion n video de motores electricos:
ENLACE DE DESCARGA DE VIDEOS DE REBOBINADO
video de rebobinado
video de rebobinado de un transformador
video de bobinadora de transformadores
LES RECOMIENDO VISITAR LAS SIGUIENTES PAGINAS DONDE PUEDEN DESCARGAR ARCHIVOS:
PAGINA DE DESCARGA PARA MUSICA, VIDEOS, IMAGENES, ETC.
PAGINA DE DESCARGA PARA TODO TIPO DE PROGRAMAS Y ALGUNOS JUEGOS PARA CELULAR.
PAGINA PARA BAJAR VIDEOS DIRECTAMENTE DE YOUTUBE.
Los motores universales grandes tienen algún tipo de compensación. Normalmente se trata del devanado compensador del motor serie o un devanado de campo distribuido especialmente para contrarrestar los problemas de la reacción de armadura.
Su esquema de conexiones y sus características de funcionamiento corresponden a las de un motor serie.
El estator de los motores universales que se utilizan en electrodomésticos (y también para otros servicios) suele ser bipolar, con dos bobinas inductoras.
La parte más delicada y de construcción más laboriosa de estos motores es el rotor o inducido. Núcleo, bobinados, colector y eje requieren una construcción muy cuidada. En general, los motores universales para electrodomésticos están calculados para girar a altas velocidades; y como los entrehierros son pequeños, cualquier descentramiento o desequilibrio existente en el conjunto rotor produce vibraciones que pueden perturbar el funcionamiento y dañar seriamente el motor. Estos motores se someten a una operación de equilibrado que se efectúa con complicados instrumentos electrónicos.
El eje, que gira a gran velocidad, debe sustentarse en rodamientos de bolas o sobre casquillos de bronce poroso autolubricantes.
La velocidad de estos motores depende de la carga: a más carga, menos velocidad y viceversa. Esta propiedad y el poseer un elevado par de arranque son lo más característico de los motores universales.

VENTAJAS Y DESVENTAJAS DE LOS MOTORES UNIVERSALES
Entre las ventajas de estos motores deben contarse éstas:
•Que pueden construirse para cualquier velocidad de giro y resulta fácil conseguir grandes velocidades, cosa que no puede conseguirse con otros motores de c.a.
•Funcionan indistintamente con c.c. y/o con c.a.
•Poseen un elevado par de arranque.
•La velocidad se adapta a la carga.
•Para regular la velocidad de giro basta con conectar un reóstato en serie con el inducido.
Las desventajas de estos motores son:
•Que contienen elementos delicados que requieren una revisión periódica; es preciso entonces comprobar el desgaste del colector, de las escobillas, el envejecimiento de los muelles que las oprimen contra las delgas del colector, etc.
•El contacto deslizante entre colector y escobillas produce chispas que pueden perturbar el funcionamiento de los receptores de radio y de televisión que se encuentran en zona próxima al motor.
•Por causa de la gran velocidad de giro, estos motores son algo ruidosos.

•Su inducido es de difícil reparación, casi siempre resulta más ventajoso sustituirlo por otro nuevo.
Los motores universales miniatura, como los que se utilizan en máquinas de afeitar y en juguetería, por ejemplo, tienen el inducido mucho más simple; casi siempre con tres bobinas arrolladas sobre núcleos en estrella. El colector, para que ocupe menos espacio, deja de ser de tambor para convertirse en un colector de disco. También el estator es muy simple, con una sola bobina.
En algunos juguetes que funcionan con c.a. el inductor es de dos piezas, una de ellas es móvil. El movimiento de esta parte del inductor (que se produce siempre que se interrumpe la corriente) arrastra el dispositivo del cambio de marchas.
FUNCIONAMIENTO DEL MOTOR UNIVERSAL
Los motores universales funcionan generalmente en altas velocidades, de 3.500 a 20.000 r.p.m., esto da lugar a un alto cociente de energía-a-peso y de energía-a-tamaño, haciéndolos deseables para las herramientas hand-held, aspiradores y máquinas de costura. Un motor universal tiene altas velocidades usando diversas corrientes de una fuente de energía. El funcionamiento cerca de la carga clasificada es similar para todas las fuentes, comenzar el esfuerzo de torsión es alto y la regulación de la velocidad es pobre, la velocidad es muy alta en las cargas que son bajas. Teóricamente, en la carga cero la velocidad llega a ser infinita, así algunos motores universales deben emplear controles de velocidad.
Este motor está construido de manera que cuando los devanados inducido e inductor están unidos en serie y circula una corriente por ellos, se forman dos flujos magnéticos que al reaccionar provocan el giro del rotor, tanto si la tensión aplicada es continua como alterna.
CARACTERÍSTICA PAR-VELOCIDAD DEL MOTOR UNIVERSAL
En la figura 1 se muestra una típica característica par-velocidad de un motor universal. Esta característica difiere de la característica par-velocidad de la misma máquina que opera conectada a una fuente dc por las 2 siguientes razones:
•Los devanados del inducido y de campo tienen reactancia bastante grande a 50 o 60 Hz. Una parte significativa del voltaje de entrada cae a través de estas reactancias; por tanto, EA es menor para un voltaje de entrada dado durante la operación a.c. que durante la operación d.c. Puesto que EA= kØ , para una corriente del inducido y un par inducido dados, el motor es más lento en corriente alterna que en corriente continua.
•Además, el voltaje máximo de un sistema es
veces su valor rms, de modo que podría ocurrir saturación magnética cerca de la corriente máxima de la máquina. Esta saturación podría reducir significativamente el flujo rms del motor para un nivel de corriente dado y tiende a reducir el par inducido de la máquina.

APLICACIONES DE LOS MOTORES UNIVERSALES
El motor universal tiene la característica par-velocidad descendente, fuertemente empinada de un motor dc serie, de modo que no es adecuado para aplicaciones de velocidad constante. Sin embargo, por ser compacto y dar más par por amperio que cualquier otro motor monofásico, se utiliza en aplicaciones donde se requieren un peso ligero y alto par.
Aplicaciones típicas de este motor son las aspiradoras eléctricas, los taladros y las herramientas manuales similares, así como los utensilios de cocina.
m ind
CONSTRUCCIÓN DE LOS MOTORES UNIVERSALES
Las partes principales del motor universal con arrollamiento inductor concentrado son:
•La carcasa.
•El estator
•El inducido.
•Los escudos.
La carcasa suele ser por lo regular de acero laminado, de aluminio o de fundición con dimensiones adecuadas para mantener firmes las chapas del estator. Los polos suelen estar afianzados a la carcasa con pernos pasantes. Con frecuencia se construye la carcasa de una pieza, con los soportes o pies del motor.
El estator o inductor, que se representa junto con otras partes componentes, consiste en un paquete de chapas de forma adecuada, fuertemente prensadas y fijadas mediante remaches o pernos.
El inducido es similar al de un motor de corriente continua pequeño. Consiste en un paquete de chapas que forma un núcleo compacto con ranuras normales u oblicuas y un colector al cual van conectados los terminales del arrollamiento inducido. Tanto el núcleo de chapas como el colector, van sólidamente asentados sobre el eje.
Los escudos, como en todos los motores, van montados en los lados frontales de la carcasa y asegurados con tornillos. En los escudos van alojados los cojinetes, que pueden ser de resbalamiento o de bolas, en los que descansan los extremos del eje. En muchos motores universales pueden desmontarse sólo un escudo, pues el otro está fundido con la carcasa. Los portaescobillas van por lo regular sujetos al escudo frontal mediante pernos.
DETECCIÓN, LOCALIZACIÓN Y REPARACIÓN DE AVERÍAS EN MOTORES UNIVERSALES
•Pruebas: Tanto el arrollamiento inductor como el del inducido deben verificarse detenidamente antes y después de su montaje. El arrollamiento inductor se comprobará en busca de contactos a masa, cortocircuitos, interrupciones e inversiones de polaridad. No hay que olvidar que antes de rebobinar un inducido hay que verificar el colector en busca de posibles delgas en cortocircuito o contactos a masa.
•Reparación: Las averías que pueden presentarse en los motores universales son las mismas que ocurren en los de motores continua. A continuación, se enumeran las más corrientes:
•Si se producen chispas abundantes en funcionamiento, las causas pueden ser:
•Terminales de bobinas conectados a delgas que no corresponden.
•Polos inductores con cortocircuito.
•Interrupción en las bobinas del inducido.
•Cortocircuito en las bobinas del inducido.
•Terminales de bobinas invertidos.
•Cojinetes desgastados.
•Láminas de mica salientes.
•Sentido de rotación invertidos.
•Si el motor se calienta en exceso, puede ser debido a:
•Cojinetes desgastados.
•Falta de engrase en los cojinetes.
•Bobinas con cortocircuitos.
•Sobrecarga.
•Arrollamientos inductores con cortocircuitos.
•Escobillas mal situadas.
•Si el motor desprende humo, las causas pueden ser:
•Inducido con cortocircuitos.
•Cojinetes desgastados.
•Arrollamientos inductores con cortocircuitos.
•Tensión inadecuada.
•Sobrecarga.
•Si el par motor es débil, puede ser debido a:
•Bobinas con cortocircuitos.
•Arrollamientos inductores con cortocircuitos.
•Escobillas mal situadas.
•Cojinetes desgastados.

acontinuacion n video de motores electricos:
ENLACE DE DESCARGA DE VIDEOS DE REBOBINADO
video de rebobinado
video de rebobinado de un transformador
video de bobinadora de transformadores
LES RECOMIENDO VISITAR LAS SIGUIENTES PAGINAS DONDE PUEDEN DESCARGAR ARCHIVOS:
PAGINA DE DESCARGA PARA MUSICA, VIDEOS, IMAGENES, ETC.
PAGINA DE DESCARGA PARA TODO TIPO DE PROGRAMAS Y ALGUNOS JUEGOS PARA CELULAR.
PAGINA PARA BAJAR VIDEOS DIRECTAMENTE DE YOUTUBE.
Suscribirse a:
Entradas (Atom)